
HSR 親しみやすいロボット開発
介護現場で生活を支援するHSRの動作を開発・研究
実際の介護現場においてHSR(トヨタ自動車製 Human Support Robot)を用いた入退出の手伝いを目的に、カードキーでドアを開けるアプリケーションを開発して、2018年3月に実証実験を行いました。
人を相手にした動作例(2017国際ロボット展への出展アプリケーション)
「人と遊ぶ」を目的として組み込んだ動作です。2017国際ロボット展では、来場者様と「じゃんけん」をして遊ぶデモアプリケーションを展示いたしました。
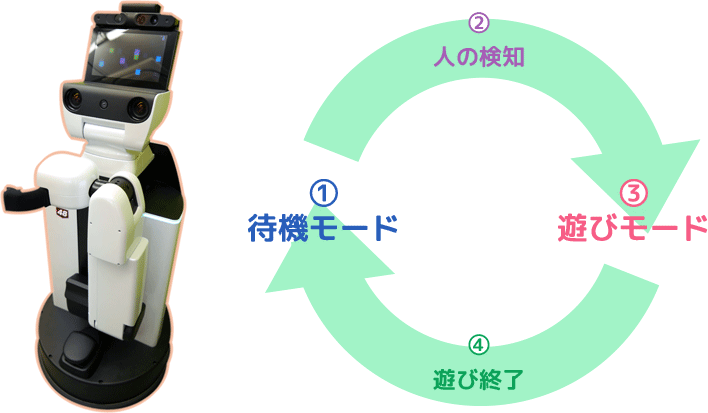
1.待機モード
人が居ないときは待機モードで動作。ARマーカ検知※1と自律移動※2を利用し、テーブル上のものを移動させて人を待ちます。
2.人の検知
待機モード中の一連の動作中に、人物位置推定※3を利用し、人がHSRの近くに訪れたことを検知します
3.遊びモード
「じゃんけん」「あっち向いてホイ」をして、人と遊びます。ハンドジェスチャー検知※4を利用し、HSRに向かって手を見せることで遊ぶことができます。
4.遊び終了
ARマーカ検知※1と自律移動※2を利用し、人にお土産を渡します。
用語解説
| ※1 | ARマーカ検知(HSR標準提供) | 2台のカメラ(ステレオカメラ)で画像処理を行い、ARマーカを認識。視差を計算することでARマーカまでの距離を推定し、3D空間上にマッピングする技術 |
| ※2 | 自律移動(HSR標準提供) | 目標を指定すると、障害物を回避したルートを計算、台車・関節を自動制御する技術 |
| ※3 | 人物位置推定(自社開発) | HSRに搭載されている「RGB-Dカメラ」を利用し、「カラー画像」に対して人物顔領域を算出。「深度画像」から人物顔領域を切り出し、人物までの距離を推定し、3D空間上にマッピングする技術 |
| ※4 | ハンドジェスチャー検知(自社開発) | 「深度画像」から、じゃんけん用の手型認識と、あっち向いてホイ用の手指方向検出を実装 |
手指の方向検知についての技術解説
手指の方向検知についての技術解説PDFはこちらから【別ウィンドウ】
- 数値変換
- 2値化画像作成
- 輪郭算出
- 方向判定